
Supersonic Aircraft Climb Problem
The minimum time-to-climb of a supersonic aircraft optimal control problem is stated as follows. Minimize the cost functional $$J=t_f$$ subject to the dynamic constraints $$\begin{array}{lcl}\dot{h} & = & v\sin\gamma, \\ \dot{v} & = &\displaystyle \frac{T\cos\alpha-D}{m}-\frac{\mu}{r^2}\sin\gamma, \\ \dot{\gamma} & = & \displaystyle \frac{T\sin\alpha+L}{m v} + \displaystyle\left(\frac{v}{r} - \frac{\mu}{v r^2}\right)\cos\gamma, \\ \dot{m}(t) & = &\displaystyle -\frac{T}{g_0 I_{sp}}\end{array}$$ and the boundary conditions $$\begin{array}{lclclcl} h(0) & = & 0~\textrm{m} & , & h(t_f) & = & 19994~\textrm{m}, \\ v(0) & = & 129.314~\textrm{m}\cdot\textrm{s}^{-1} & , & v(t_f) & = & 295.092~\textrm{m}\cdot\textrm{s}^{-1}, \\ \gamma(0) & = & 0~\textrm{rad} & , & \gamma(t_f) & = & 0~\textrm{rad}. \end{array}$$ The solution to the minimum time-to-climb of a supersonic aircraft optimal control problem using GPOPS-II is shown in the figures below.
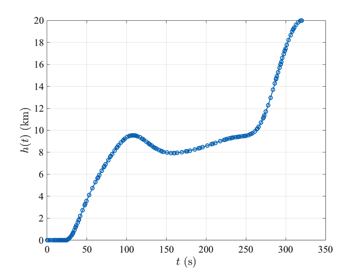
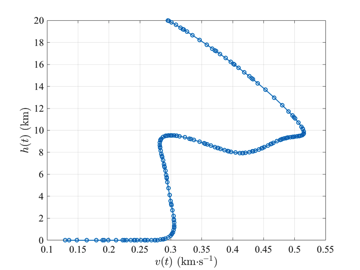
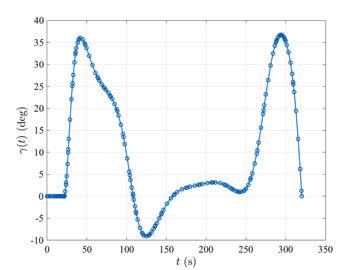

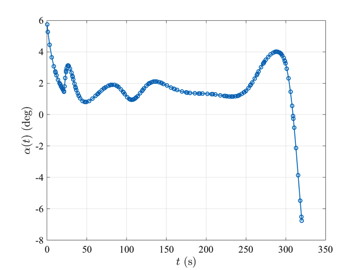
Image Courtesy of the United State Air Force. URL: http://www.af.mil/shared/media/photodb/photos/110408-F-HA566-582.JPG. Used with Permission.

